PX4 Autopilot Release v1.13 Brings Dynamic Control Allocation
PX4 Autopilot is an open-source flight control system for drones and other uncrewed vehicles. It is currently utilized in industrial drone applications and consumer drones and is the leading research platform for drones. And it is made possible by a robust community of contributors working together to improve it daily. And speaking of improving it, […]

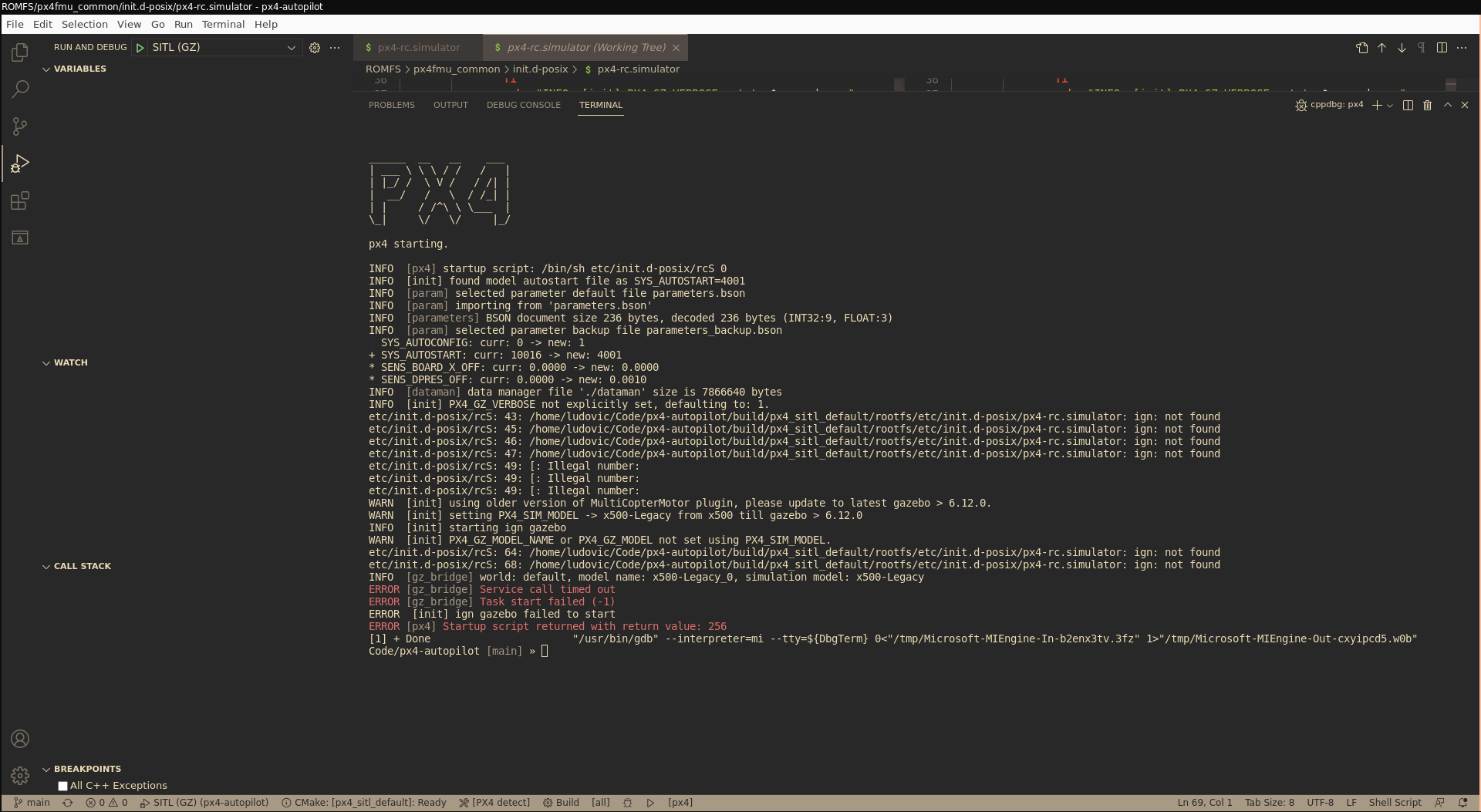
Dynamic Control allocation(Master branch): flight issues · Issue #19577 · PX4/PX4-Autopilot · GitHub
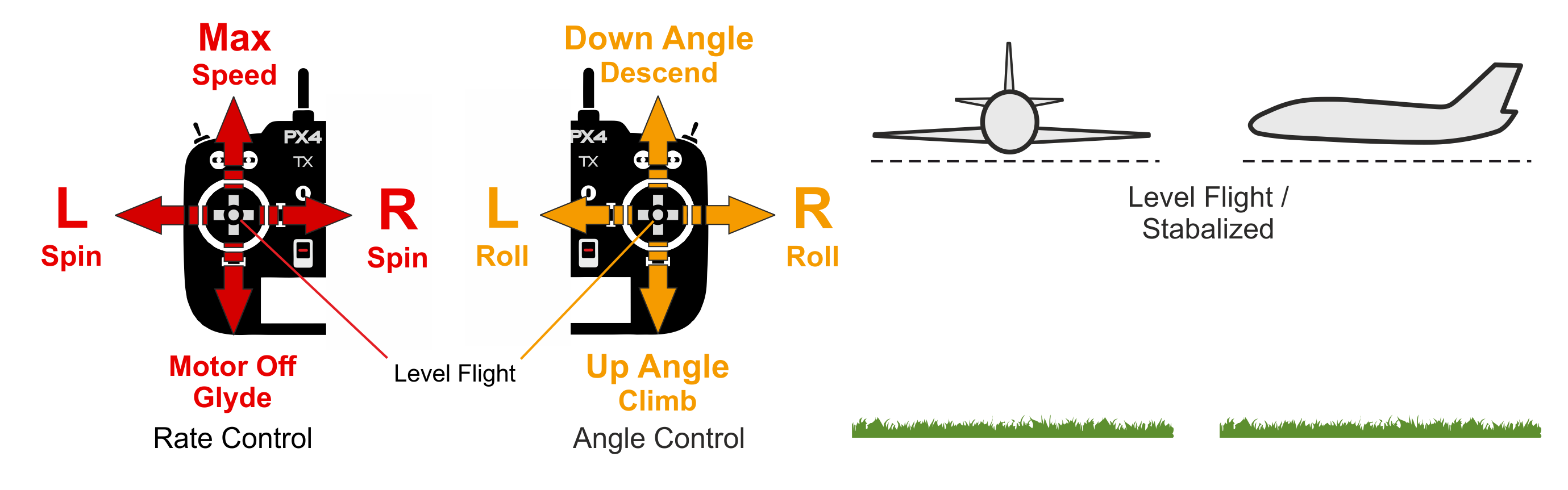
PX4 Flight Modes Overview
PX4 Dev Call: November 23, 2022 - PX4 Autopilot Coordination - Discussion Forum for PX4, Pixhawk, QGroundControl, MAVSDK, MAVLink
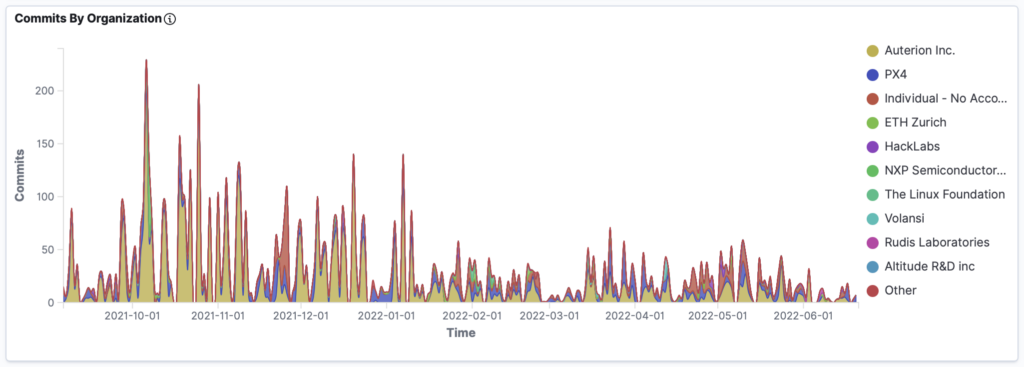
PX4 Autopilot Release v1.13 Brings Dynamic Control Allocation, Expanded Hardware Support, and More - PX4 Autopilot
Automation, Free Full-Text

Incremental control system design and flight tests of a micro-coaxial rotor UAV - ScienceDirect

arxiv-sanity
PX4 Community Q&A: August 02, 2023 - PX4 Autopilot Coordination - Discussion Forum for PX4, Pixhawk, QGroundControl, MAVSDK, MAVLink
Automation, Free Full-Text