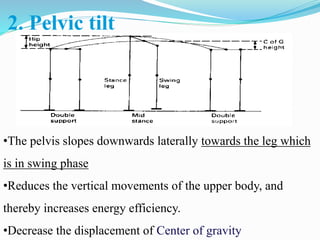
Gait Cycle phases and sub-phases according to [19].

vi.1 Final Control Model in Matlab Simulink

The physical robot. A diagram of the flexible modular robot for which

The recognition accuracies versus the increase of the sampling rate
Može li obrazac hoda utjecati na bol stopala? - Marko Drašković

The process of dividing and annotating a stand-sit-stand scenario is

The recognition accuracies versus the increase of the sampling rate

Symmetry-breaking bifurcations from the two-legged hop. 1H2 K 3 is the

Donato IMPEDOVO, Professor (Associate), Ph.D. Computer Engineering, Università degli Studi di Bari Aldo Moro, Bari, Università di Bari, Dipartimento di Informatica

Target and nontarget class composition for each test case.

Vertical and horizontal motions and trunk angle of the 5 link robots

Donato IMPEDOVO, Professor (Associate), Ph.D. Computer Engineering, Università degli Studi di Bari Aldo Moro, Bari, Università di Bari, Dipartimento di Informatica

Comparison of various machine learning model's accuracy between subject

Can walking patterns affect foot pain? - Marko Drašković
The evolution of the 3D-model states with the target and applied

Symmetry-breaking bifurcations from the two-legged hop. 1H2 K 3 is the