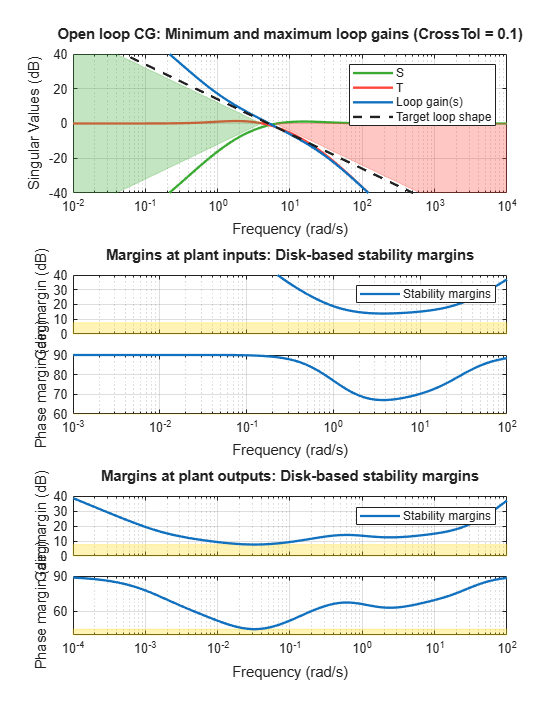
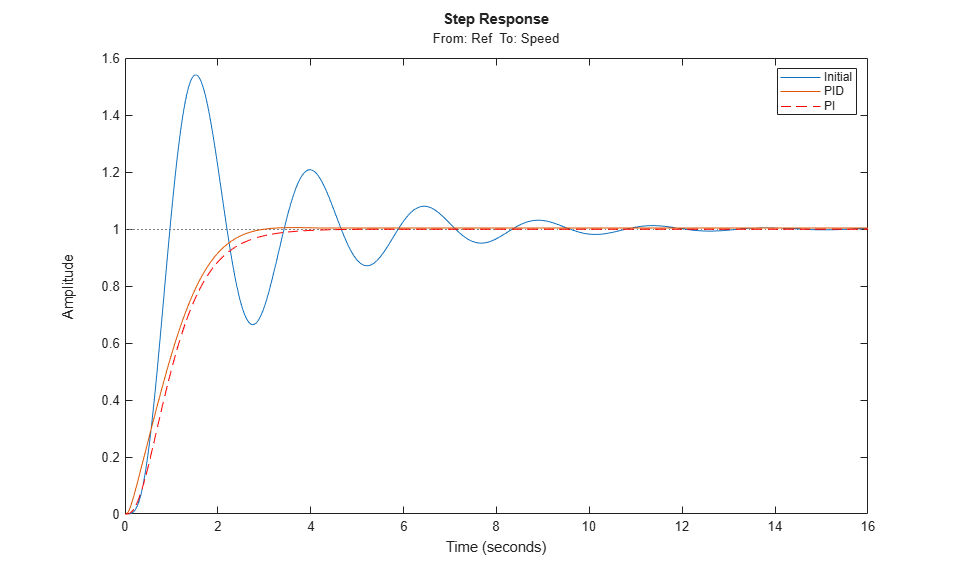
Multi-Loop PI Control of a Robotic Arm - MATLAB & Simulink
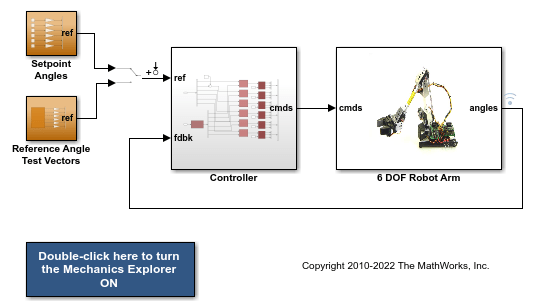
This example shows how to use looptune to tune a multi-loop controller for a 6-DOF robotic arm manipulator.
Use looptune to tune a multi-loop controller for a 6-DOF robotic arm manipulator.

Modeling and Control of 5DOF Robot Arm Using Supervisory Control
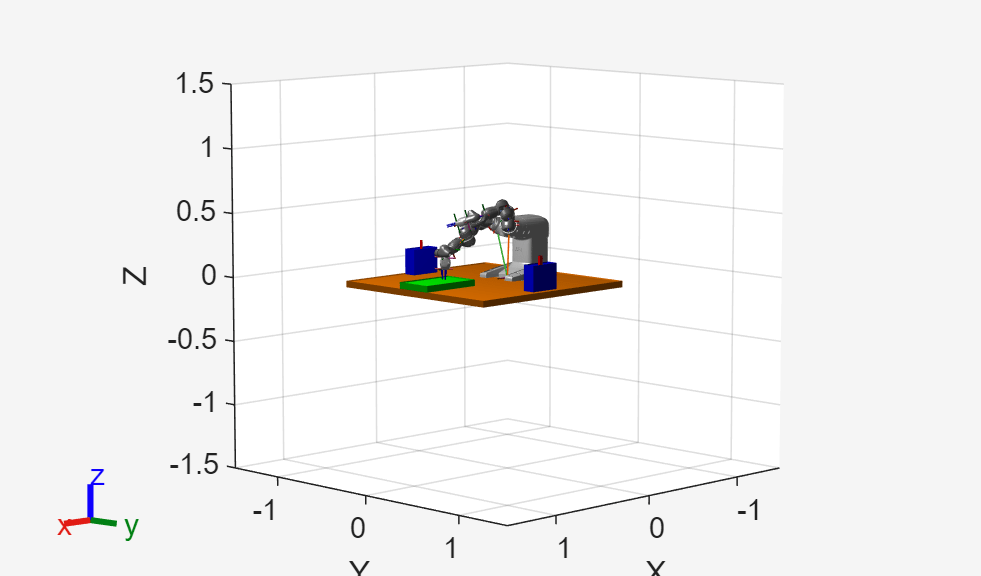
Model and Control a Manipulator Arm with Robotics and Simscape
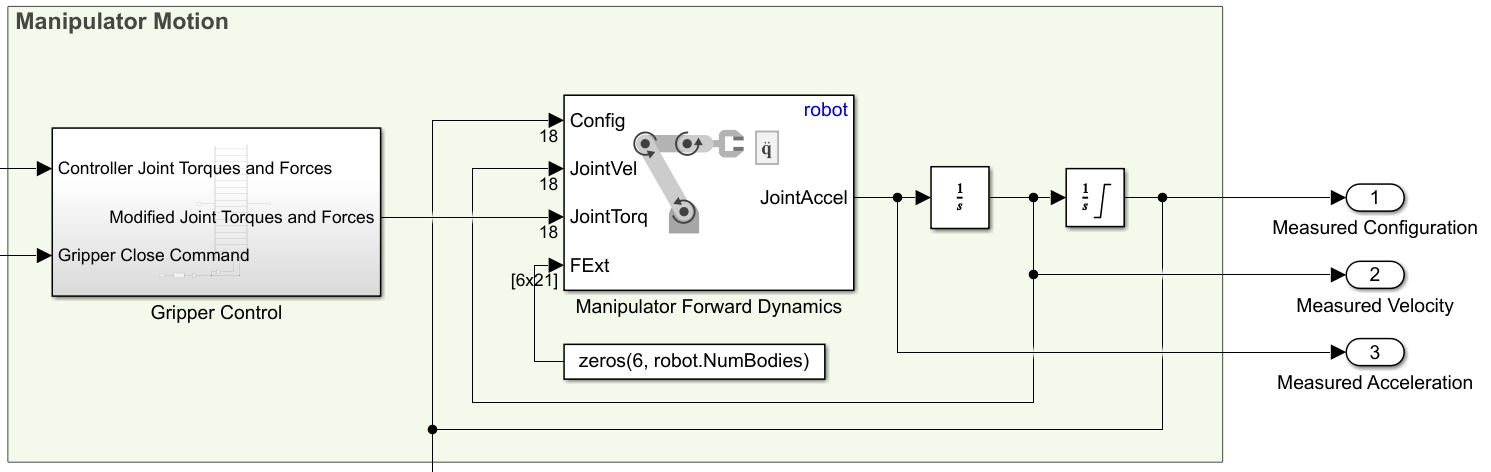
Model and Control a Manipulator Arm with Robotics and Simscape
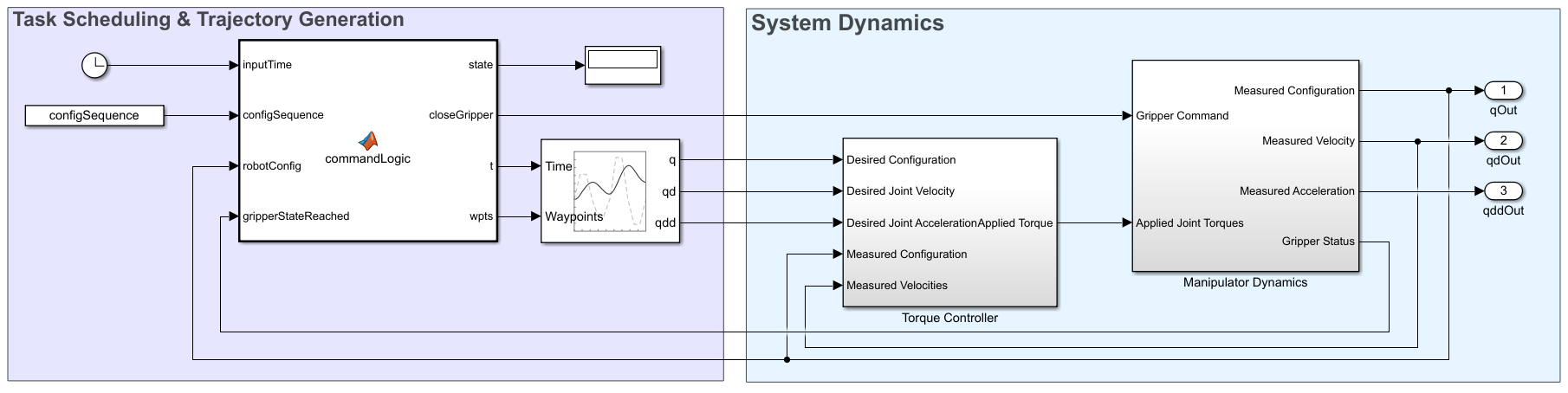
Model and Control a Manipulator Arm with Robotics and Simscape
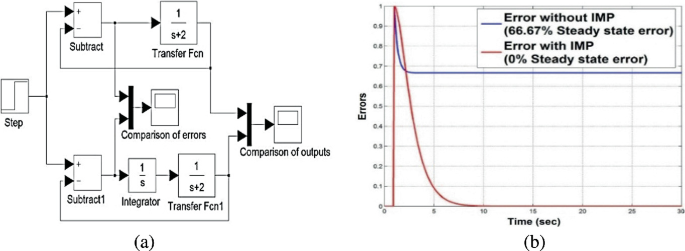
Modified Multiloop Finite Dimensional Robust Repetitive Control
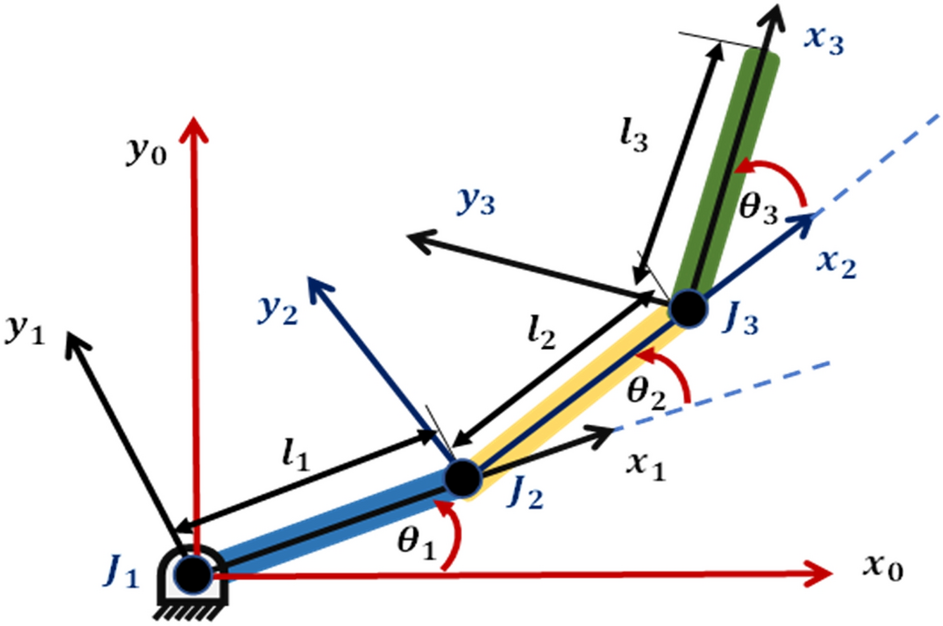
Optimization of PID trajectory tracking controller for a 3-DOF
Tuning of a Two-Loop Autopilot - MATLAB & Simulink

Dynamics and control of a robotic arm having four links
Programmatic Tuning - MATLAB & Simulink
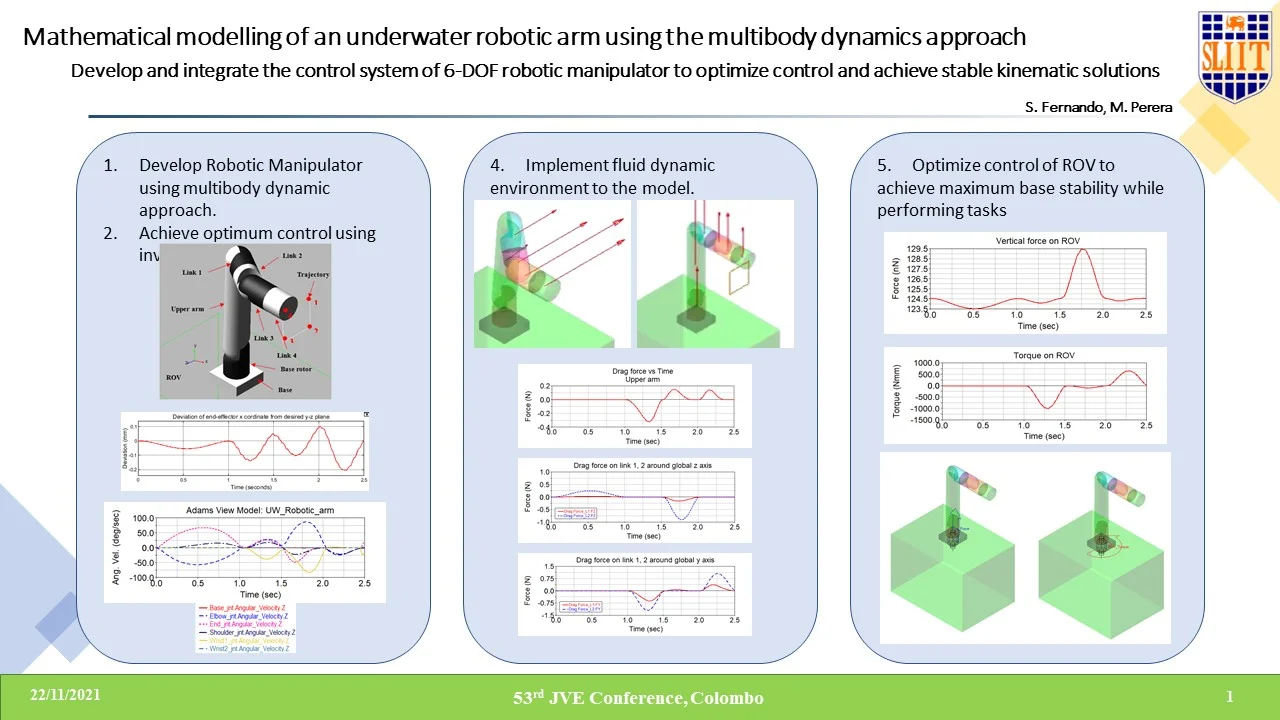
Development of an underwater robotic arm using multibody dynamics
Parameter adaptive sliding mode trajectory tracking strategy with

Energies, Free Full-Text