
Frontiers Gait Optimization Method for Humanoid Robots Based on
5
(478)
Write Review
More
$ 32.00
In stock
Description
Frontiers Gait Optimization Method for Humanoid Robots Based on

Overview of humanoid robot HRP-4 (left). The robot can wear a
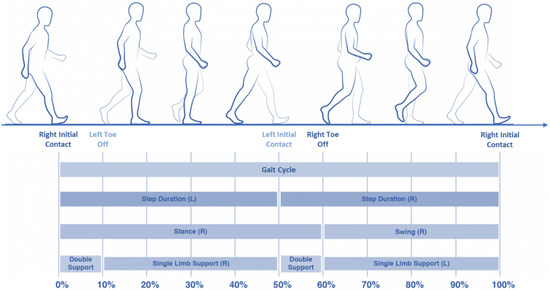
Frontiers Inertial sensors for gait monitoring and design of
Frontiers Optimization-Based Motion Generation for Buzzwire
Sensors, Free Full-Text

Smart Gait: A Gait Optimization Framework for Hexapod Robots

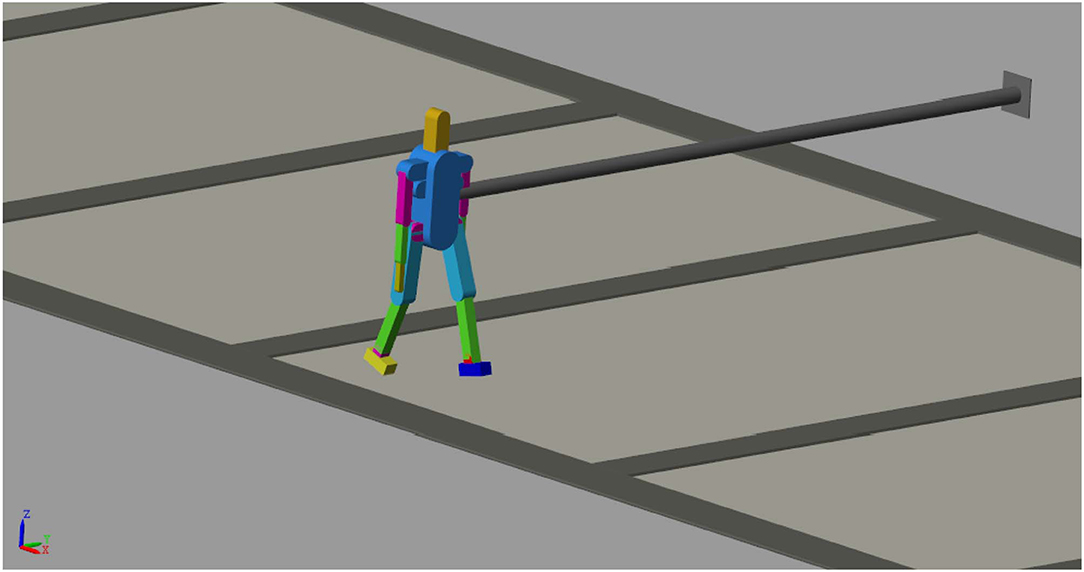
Comparison of the body scale between the human subject model and
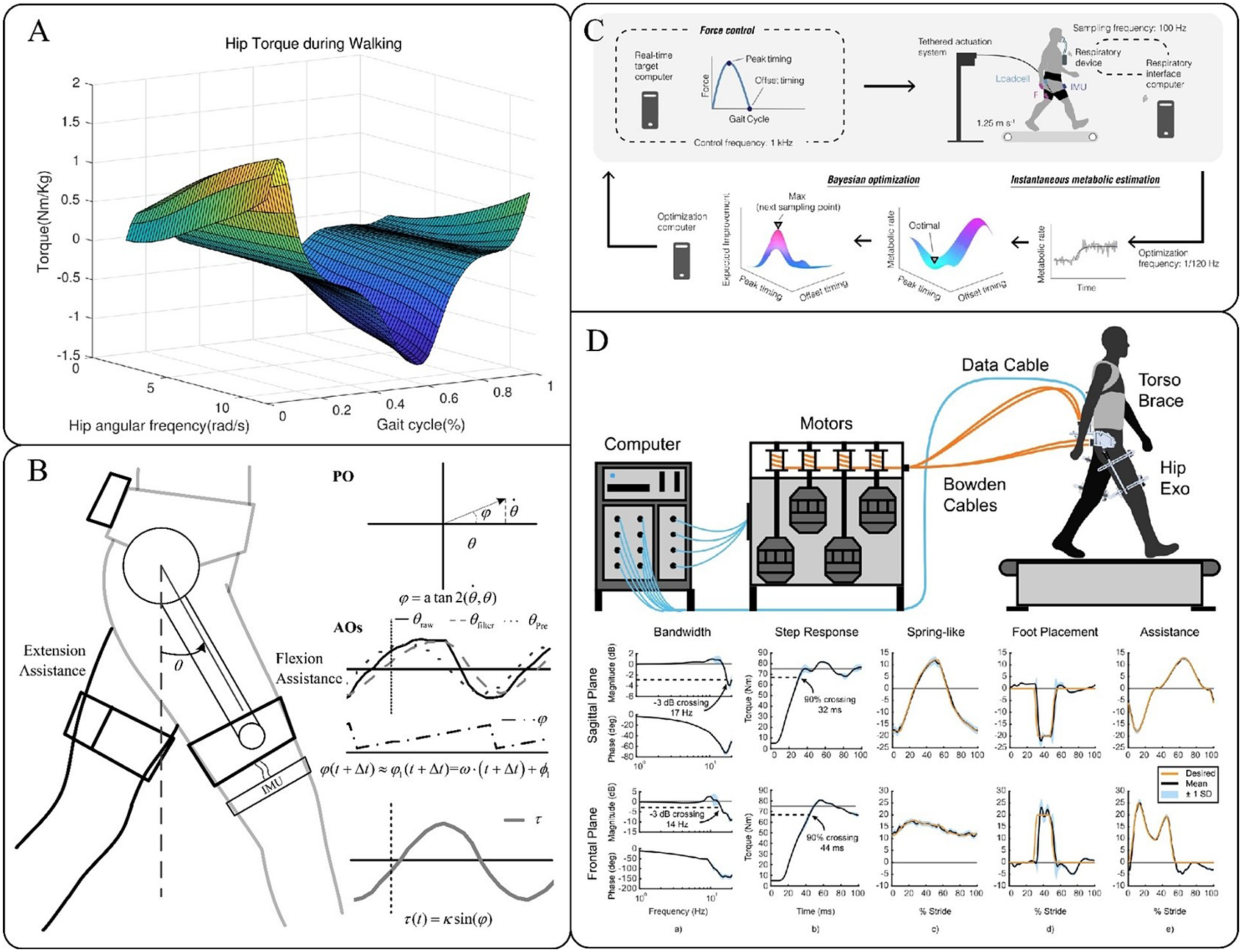
Current developments of robotic hip exoskeleton toward sensing

Smart Gait: A Gait Optimization Framework for Hexapod Robots
Frontiers Biped Robots With Compliant Joints for Walking and

Sensors, Free Full-Text

PDF] Tello Leg: The Study of Design Principles and Metrics for

You may also like




