Sensors, Free Full-Text
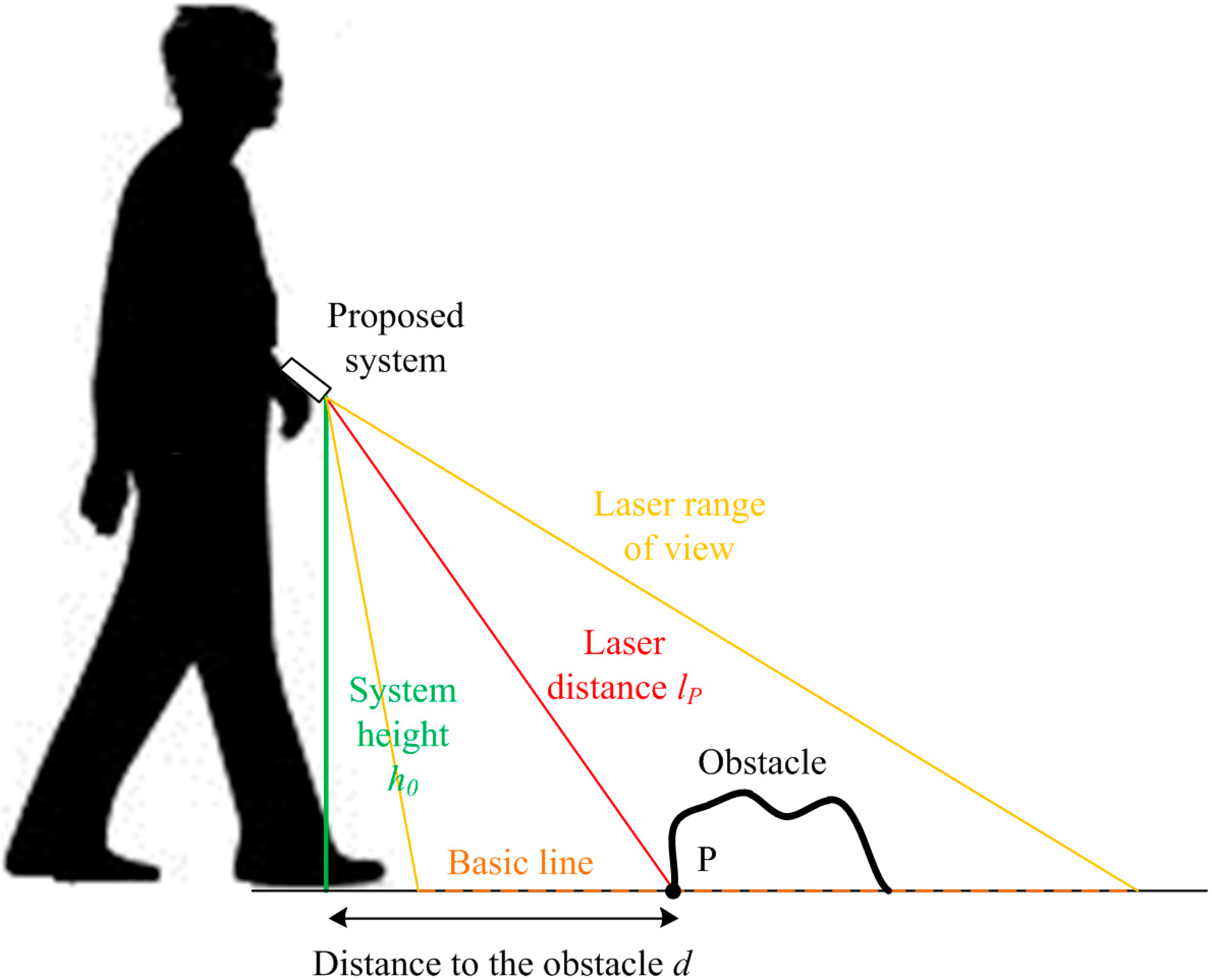
A virtual blind cane system for indoor application, including a camera, a line laser and an inertial measurement unit (IMU), is proposed in this paper. Working as a blind cane, the proposed system helps a blind person find the type of obstacle and the distance to it. The distance from the user to the obstacle is estimated by extracting the laser coordinate points on the obstacle, as well as tracking the system pointing angle. The paper provides a simple method to classify the obstacle’s type by analyzing the laser intersection histogram. Real experimental results are presented to show the validity and accuracy of the proposed system.
Sensors, Free Full-Text
Sensors, Free Full-Text, bldc motor
Sensors, Free Full-Text, underground roleplay download

d10lvax23vl53t.cloudfront.net/images/industryfocus

Sensors, Free Full-Text, ray manchester x reader

Sensors, Free Full-Text, Active Electric Dipole Energy Sources: Transduction via Electric Scalar and Vector Po…

Sensors, Free Full-Text, pct-off 70-90
Free Sensors eBooks
Sensors, Free Full-Text, bldc motor
Sensors, Free Full-Text