A novel anti-slip control approach for railway vehicles with traction based on adhesion estimation with swarm intelligence

Combined acceleration slip regulation for multi-wheel distributed electric drive vehicles considering torque loss factor - ScienceDirect

Typical shape of the general friction force and adhesion force in

PDF] Re-adhesion control for a railway single wheelset test rig based on the behaviour of the traction motor

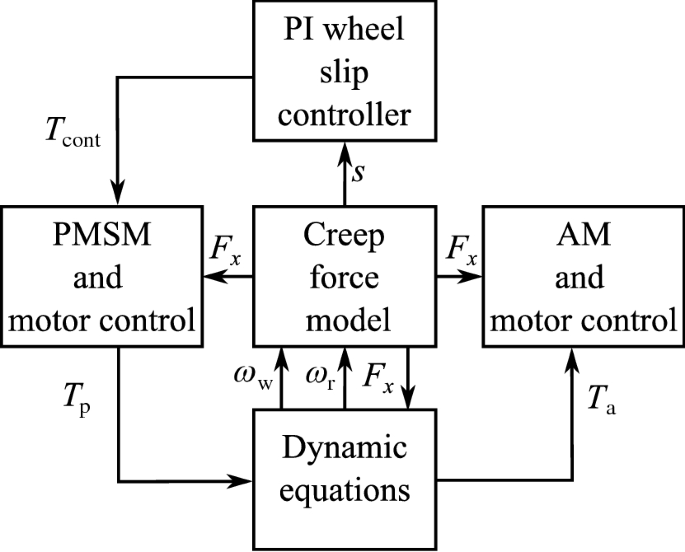
A mechatronic approach for effective wheel slip control in railway traction

PDF] A Design of Prototype 1C2M Railway Vehicle Propulsion Control System Considering Slip Reduction of Traction Motor

Combined acceleration slip regulation for multi-wheel distributed electric drive vehicles considering torque loss factor - ScienceDirect

Overall configuration of HILS

Typical shape of the adhesion coefficient according to the slip ratio

Figure 4 from Anti-slip re-adhesion control method for increasing the tractive force of locomotives through the early detection of wheel slip convergence

Example of a wheel-slip control mechanism based on the relationship

21: An illustration of the posteriori, priori and predicted state

Overall configuration of HILS

高速列车滑模自抗扰黏着控制方法

9: Vertical and lateral rail irregularities